详细解析轻量级光线追踪引擎的实现原理,从视口构建到透视投影的完整过程
本文详细介绍光线追踪的基本原理和实现方法,以直观的方式解释光线如何与物体相交并生成图像。文章从 PPM 格式图像表示开始,深入讲解射线数学表达、点乘与叉乘等向量运算的几何意义,并展示了主射线、阴影射线、反射射线和折射射线如何协同工作构建逼真的 3D 渲染场景。
首先理解这三件事:
-
人的眼睛能看到东西,是因为光从物体上反射进入到人眼,根据光线可逆性,我们可以把这个过程”想象”是由于人的眼睛发出光,投射到物体上,于是物体被看见了。现在,基于这个概念,用一条直线,带有方向,来模拟人眼,就称为 ray 线吧,即射线。
-
数学知识:平面有两个点:O 点,P 点,O 点固定,P 点运动,但是 P 点的运动受到约束: 那么 P 点的运动轨迹肯定是一个平面圆。三维的立体圆也一样。
-
如果 ray 向空间任意方向发射光线,再假设存在一个完全透明的立体球(此时完全看不见),当 ray 线与它相交 (交点为 1,在表面,交点为 2,穿过内部),这个时候将交点以及交点内部都涂色,是不是马上就能看见这个立体球了?只需要满足约束: 即可。这其实就渲染出来了一个 3D 的球体。
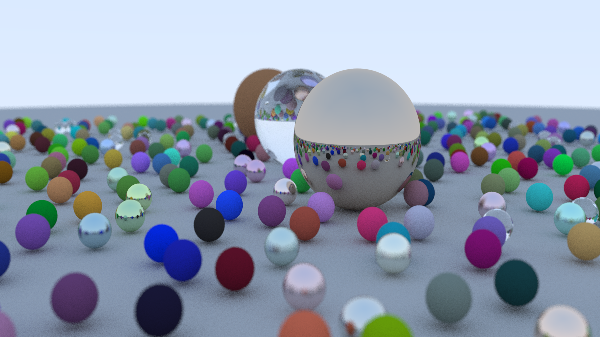
好了,理解了这个就理解了光线追踪最基本的知识,然后你就能画出如下的图了:
基础#
先从最基本的来,打好基础,把框架做好。以下都是基于三维坐标进行构建的。
1. 如何表示图片?#
这里使用 PPM 图片格式,其最简单的内容如下:
P3# 注释3 2255255 0 0 0 255 0 0 0 255255 255 0 255 255 255 0 0 0- 首行为”P3”,表示是 ASCII 格式的 PPM 文件
- “3 2”表示图像尺寸为宽 3 像素、高 2 像素 (像素点的表达使用 RGB,如 (255,0,0) 表示红点)
- “255”表示最大颜色值
- 随后 6 组 RGB 数值表示 6 个像素的颜色值
所以实际图片显示如下:

2. 数学基础#
射线 前面提到的 ray 射线,在空间中满足:
其中:
- 是射线上任意一点的位置向量
- 是射线起点
- 是射线的单位方向向量
- 是参数,表示从起点沿方向行进的距离
如果要展示具体的分量形式,可以写作:
涉及到向量以及矩阵,但是不需要深究,代码实现起来也不难理解。现在只需要明白几个知识点即可。
射线又可以分为:
- 视线射线 (View Ray):
又叫做主射线,主射线是从相机/观察点 (view point) 发出,穿过图像平面上的每个像素,用于确定该像素”看到”的场景内容。这些射线决定了哪些物体会出现在最终渲染的图像中。
- 阴影射线 (Shadow Ray)
阴影射线又叫次级射线,它是从物体表面的交点发出,用于计算光照、阴影、反射和折射等效果。主要包括:
- 阴影射线:从交点指向光源,判断是否被遮挡
- 反射射线:根据反射定律计算,用于渲染镜面反射
- 折射射线:穿透透明物体,产生折射效果
点乘
向量 a 和 b 的点乘 (dot),表示如下:
对应的矩阵表达方式是:
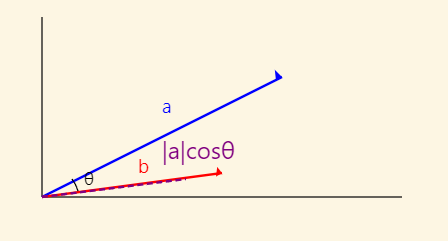
*点乘的几何意义:
- 结果是一个标量
- 等于向量 b 的长度乘以向量 a 在向量 b 方向上的投影长度 (反过来也一样)
- 反映两向量方向的相似度:
- 正值:夹角<90°(方向相似)
- 零值:夹角=90°(垂直)
- 负值:夹角>90°(方向相反)
叉乘
对于向量 和 ,叉乘 (cross) 可以表示为:
展开后得到:
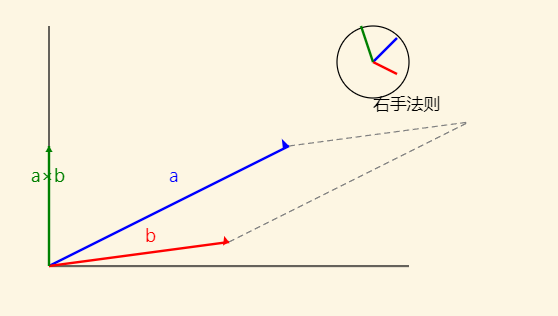
叉乘的几何意义:
- 结果是一个向量,且垂直于 和
- 方向遵循右手定则
- 模长等于
- 等于由两向量构成的平行四边形的面积
- 常用于计算法向量
用代码表示如下:
// 省略其他代码
using point3 = vec3;
// 点乘inline double dot(const vec3& u, const vec3& v) { return u.e[0] * v.e[0] + u.e[1] * v.e[1] + u.e[2] * v.e[2];}
// 叉乘inline vec3 cross(const vec3& u, const vec3& v) { return vec3( u.e[1] * v.e[2] - u.e[2] * v.e[1], u.e[2] * v.e[0] - u.e[0] * v.e[2], u.e[0] * v.e[1] - u.e[1] * v.e[0] );}// 单位向量inline vec3 unit_vector(const vec3& v) { return v / v.length();}ray 射线的表达:
#ifndef RAY_H#define RAY_H
#include "vec3.h"class ray { public: // ray 的构造函数 ray() {} ray(const point3& origin, const vec3& direction) : orig(origin), dir(direction) {}
// 原点以及方向 const point3& origin() const { return orig; } const vec3& direction() const { return dir; } // 当前的位置表达:p_at = orig + t*dir point3 at(double t) const { return orig + t*dir; }
private: point3 orig; vec3 dir;};
#endif3. 空间坐标#
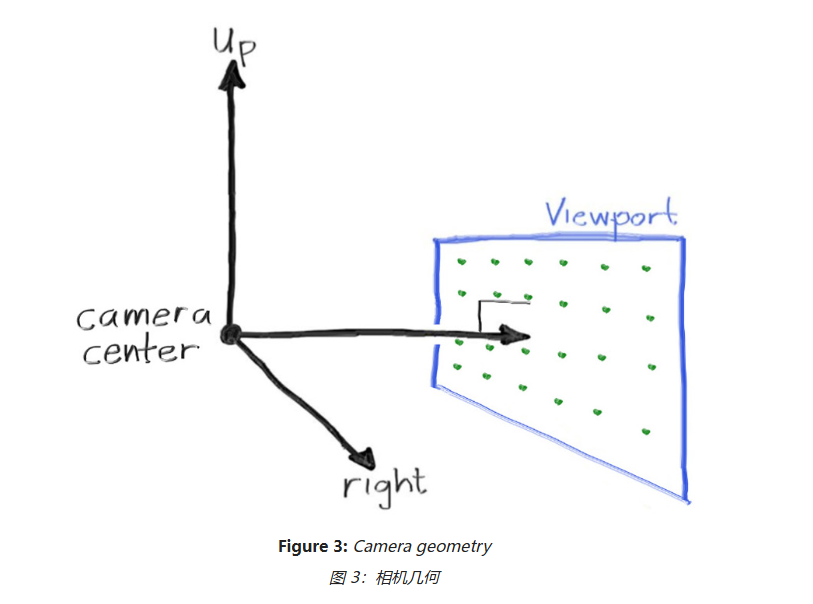
现在假设有一个相机,它是射线的出发点,作为原点,坐标是 (0,0,0)。然后还需要一个屏幕,这里我们叫做 viewport , 但是它也是虚拟的,是由像素矩阵组成的,对应着我们能看到的图像的平面。它们目前的关系如下:
回到像素矩阵平面,其坐标如下:
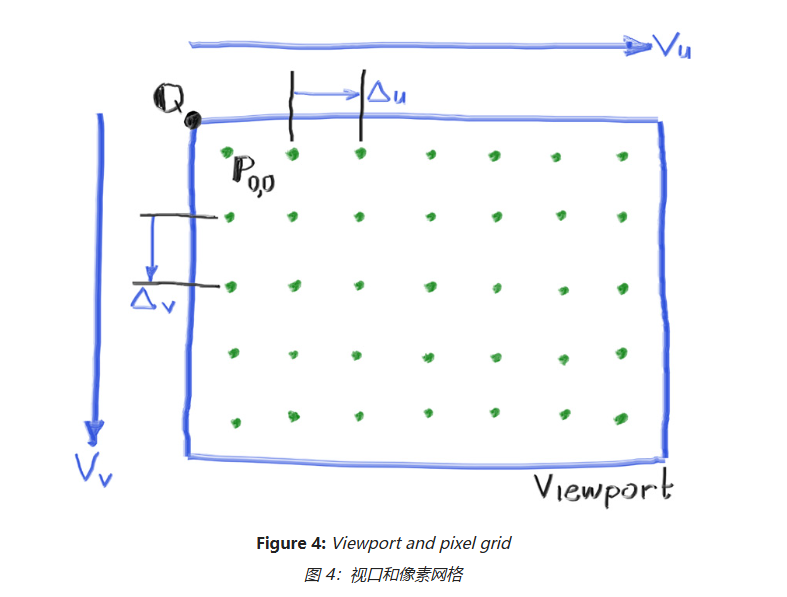
这里要区分视口原点 Q,像素原点 P(0,0),它们的坐标是不一样的。
现在使用代码来实现这些坐标,如下:
auto aspect_ratio = 16.0 / 9.0; // 设置长宽比,可调整 int image_width = 400; // 图像宽度
// 根据图像宽度,计算图像高度 int image_height = int(image_width / aspect_ratio); image_height = (image_height < 1) ? 1 : image_height;
// 相机 // 相机原点到视口中心点的垂直距离 auto focal_length = 1.0; // viewport 的 高度 auto viewport_height = 2.0; // 根据 viewport 的高度,计算其宽度 auto viewport_width = viewport_height * (double(image_width)/image_height); // 相机中心点 auto camera_center = point3(0, 0, 0);
// viewport 的 U,V 方向坐标 auto viewport_u = vec3(viewport_width, 0, 0); auto viewport_v = vec3(0, -viewport_height, 0);
// Calculate the horizontal and vertical delta vectors from pixel to pixel. // viewport 上面的像素点间的距离 (u,v 方向根据 viewport 的宽和高来分别计算) auto pixel_delta_u = viewport_u / image_width; auto pixel_delta_v = viewport_v / image_height;
// Calculate the location of the upper left pixel. // 计算得到左上角 Q 点的坐标 auto viewport_upper_left = camera_center - vec3(0, 0, focal_length) - viewport_u/2 - viewport_v/2; // 计算得到起始像素点的坐标 (P(0,0) 点) auto pixel00_loc = viewport_upper_left + 0.5 * (pixel_delta_u + pixel_delta_v);有了相机中心点,viewport 的左上角的点,和像素的第一个点 (扫描所有像素点时,从左到右,从上到下,因此左上角是起点)
// 按行从左到右扫描 for (int j = 0; j < image_height; j++) { // 从上到下扫描列 for (int i = 0; i < image_width; i++) { // 每次扫描时的像素点坐标 auto pixel_center = pixel00_loc + (i * pixel_delta_u) + (j * pixel_delta_v); // ray 射线方向,由相机中心点指向像素点 auto ray_direction = pixel_center - camera_center; // 因此获得 ray 射线 ray r(camera_center, ray_direction); // 射线所扫描到的点,使用 ray_color 进行着色 color pixel_color = ray_color(r); // 着色后,写入图像 write_color(std::cout, pixel_color); } }
color ray_color(const ray& r) { return color(0,0,0);}4. 渲染#
前面已经完成部分代码,以下是主代码:
#include "color.h"#include "ray.h"#include "vec3.h"#include <iostream>
color ray_color(const ray& r) { return color(0,0,0);}
int main() {
// Image auto aspect_ratio = 16.0 / 9.0; int image_width = 400;
int image_height = int(image_width / aspect_ratio); image_height = (image_height < 1) ? 1 : image_height;
// Camera auto focal_length = 1.0; auto viewport_height = 2.0; auto viewport_width = viewport_height * (double(image_width)/image_height); auto camera_center = point3(0, 0, 0);
auto viewport_u = vec3(viewport_width, 0, 0); auto viewport_v = vec3(0, -viewport_height, 0);
auto pixel_delta_u = viewport_u / image_width; auto pixel_delta_v = viewport_v / image_height;
auto viewport_upper_left = camera_center - vec3(0, 0, focal_length) - viewport_u/2 - viewport_v/2; auto pixel00_loc = viewport_upper_left + 0.5 * (pixel_delta_u + pixel_delta_v);
// Render std::cout << "P3\n" << image_width << " " << image_height << "\n255\n";
for (int j = 0; j < image_height; j++) { std::clog << "\rScanlines remaining: " << (image_height - j) << ' ' << std::flush; for (int i = 0; i < image_width; i++) { auto pixel_center = pixel00_loc + (i * pixel_delta_u) + (j * pixel_delta_v); auto ray_direction = pixel_center - camera_center; ray r(camera_center, ray_direction);
color pixel_color = ray_color(r); write_color(std::cout, pixel_color); } }
std::clog << "\rDone. \n";}渲染的关键部分在于,获得 ray 射线后:
// 获得 ray 射线 ray r(camera_center, ray_direction); // 对射线所指向的点进行着色,即渲染 color pixel_color = ray_color(r); // 着色后写入图像文件 write_color(std::cout, pixel_color);
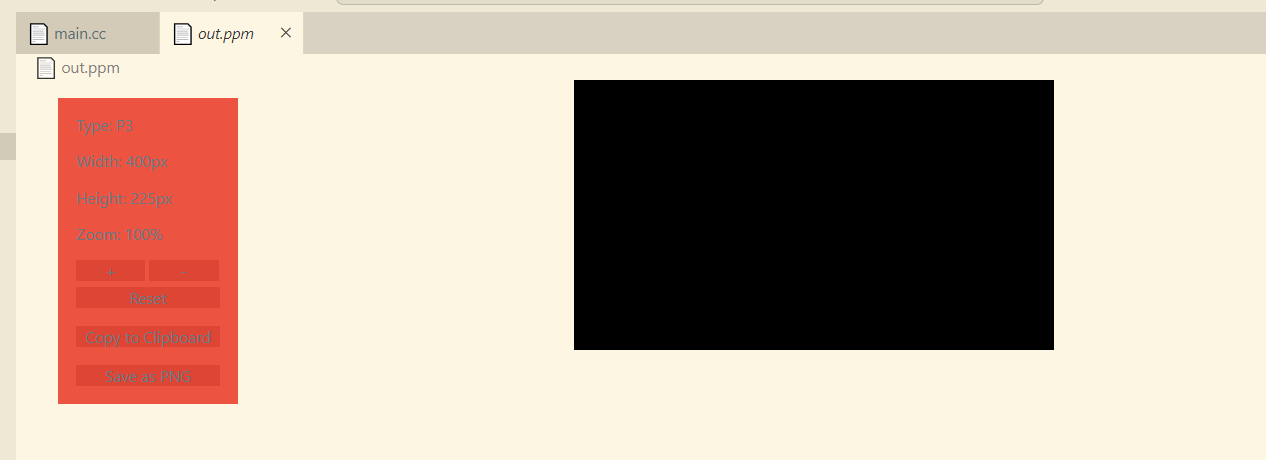
color ray_color(const ray& r) { //目前 渲染的点都为 (0,0,0) 即为黑色 return color(0,0,0);}结果如下:
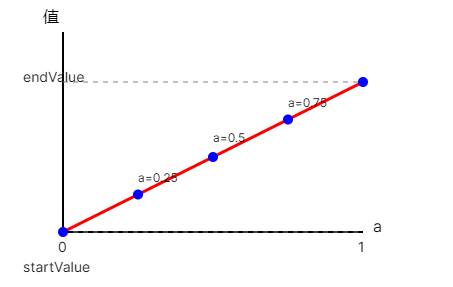
为了渲染其他颜色,需要更改 ray_color 的逻辑。这里我们想先做一个简单的渐变效果。
有一种方法叫做线性混合 或 线性插值: 其图像是:
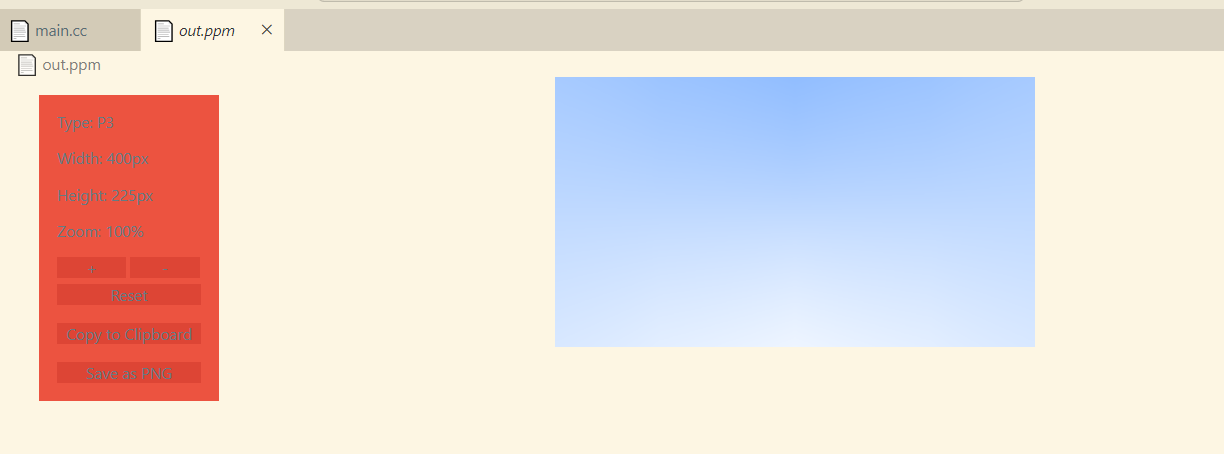
应用到代码中是这样:
color ray_color(const ray& r) { vec3 unit_direction = unit_vector(r.direction()); auto a = 0.5*(unit_direction.y() + 1.0); return (1.0-a)*color(1.0, 1.0, 1.0) + a*color(0.5, 0.7, 1.0);}所有图片变成渐变了:
5. 渲染球体#
根据前面的数学知识,我们已经知道了绘制一个想象中的球体是如何了。假设我们要在 viewport 中心处渲染处这个球体,目前球的中心点已知,ray 射线也已知,那么只剩下解方程了:
P=(x,y,z) 到中心 C=(Cx,Cy,Cz) 的向量是 (C−P), 那么球的表面方程为:(C−P)⋅(C−P)=r2
求球根公式是: ,当它无解时,表明 ray 射线与其不相交,当存在一个根时,表示想切,存在两个根,表示相交并穿过 (不过这在现在的场景下与一个根区别不大)。
// 判断 ray 射线是否碰撞到球体bool hit_sphere(const point3& center, double radius, const ray& r) { // C-Q vec3 oc = center - r.origin();
// 简化后的求根公式的系数分解 auto a = dot(r.direction(), r.direction()); auto b = -2.0 * dot(r.direction(), oc); auto c = dot(oc, oc) - radius*radius;
// 判断 b2 - 4ac 的大小 auto discriminant = b*b - 4*a*c; 大于或等于 0 时,说明有根,因此射线 ray 与球体相交。 return (discriminant >= 0);}
color ray_color(const ray& r) { // 球体的中心点为 (0,0,-1), 即在 Z 轴方向上距相机原点 (0,0,0) 1 个单位距离。半径 0.5, if (hit_sphere(point3(0,0,-1), 0.5, r)) // 当与球体相交时,渲染为红色 return color(1, 0, 0); // 其余情况,保持渐变 vec3 unit_direction = unit_vector(r.direction()); auto a = 0.5*(unit_direction.y() + 1.0); return (1.0-a)*color(1.0, 1.0, 1.0) + a*color(0.5, 0.7, 1.0);}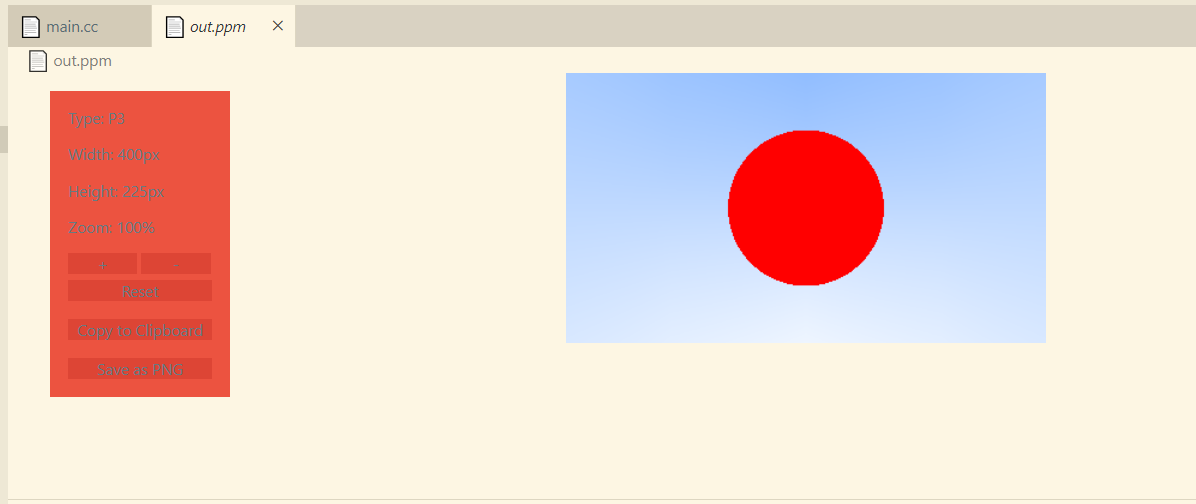
结果如预期一样,渲染出了一个球体,从想象中透明的球体变为可见的了。
6. 球体表面法线着色#
球体表面的法线即为垂直于表面的一条线,在坐标系中它位于从球心指向表面交点的方向。
刚才我们使用 ray 射线进行着色,现在使用球体表面法线进行着色。
代码如下:
double hit_sphere(const point3& center, double radius, const ray& r) { vec3 oc = center - r.origin(); auto a = dot(r.direction(), r.direction()); auto b = -2.0 * dot(r.direction(), oc); auto c = dot(oc, oc) - radius*radius; auto discriminant = b*b - 4*a*c;
if (discriminant < 0) { return -1.0; } else { // 求最小根,即离相机原点最近的交点。 return (-b - std::sqrt(discriminant) ) / (2.0*a); }}
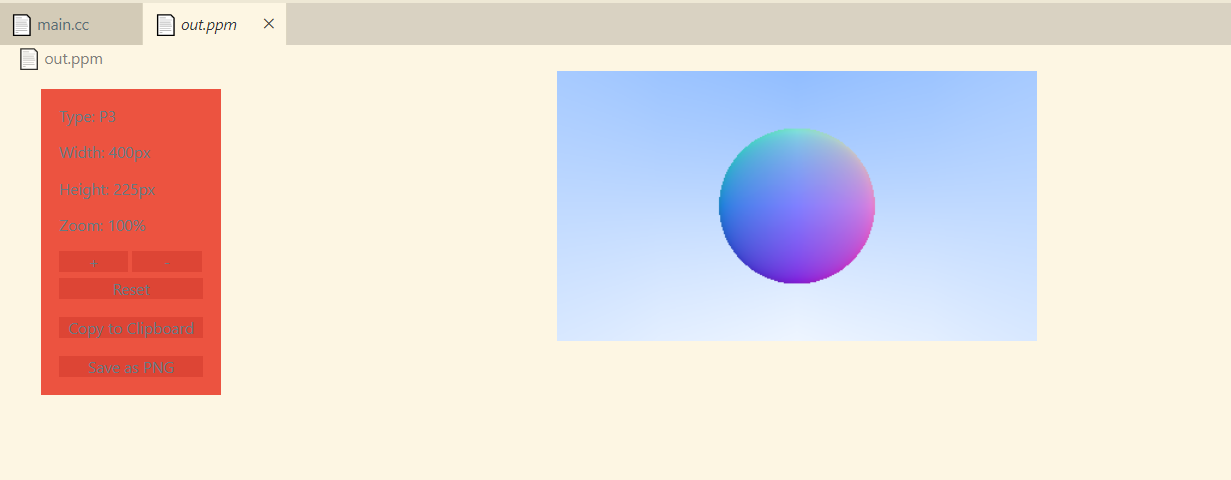
color ray_color(const ray& r) { auto t = hit_sphere(point3(0,0,-1), 0.5, r); if (t > 0.0) { // 当存在最小根时,计算法线,并将之转换为单位向量。t.at(t) 即为球体表面交点 vec3 N = unit_vector(r.at(t) - vec3(0,0,-1)); // 将法线每个分量的范围缩放到 [0,1] (N.x() 最大是 1 个单位) // 这也产生一种平滑的渐变效果 return 0.5*color(N.x()+1, N.y()+1, N.z()+1); }
vec3 unit_direction = unit_vector(r.direction()); auto a = 0.5*(unit_direction.y() + 1.0); return (1.0-a)*color(1.0, 1.0, 1.0) + a*color(0.5, 0.7, 1.0);}于是球体也有了渐变色:
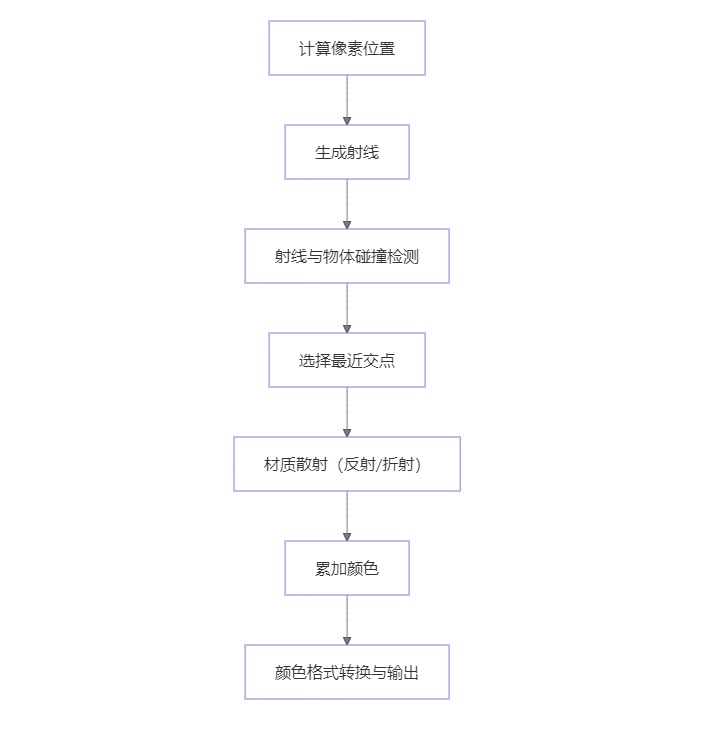
用下面的示意图总结一下整个渲染流程的核心步骤:
后续#
后面还有对交点附近的点进行抗锯齿处理、表面漫反射处理、折射处理,以及根据不同材料表面的反射情况做不同的处理等等更复杂的处理,时间有限,这样就先不写了,后面有时间再继续写。有兴趣可以看参考链接。